Vector Field Navigation
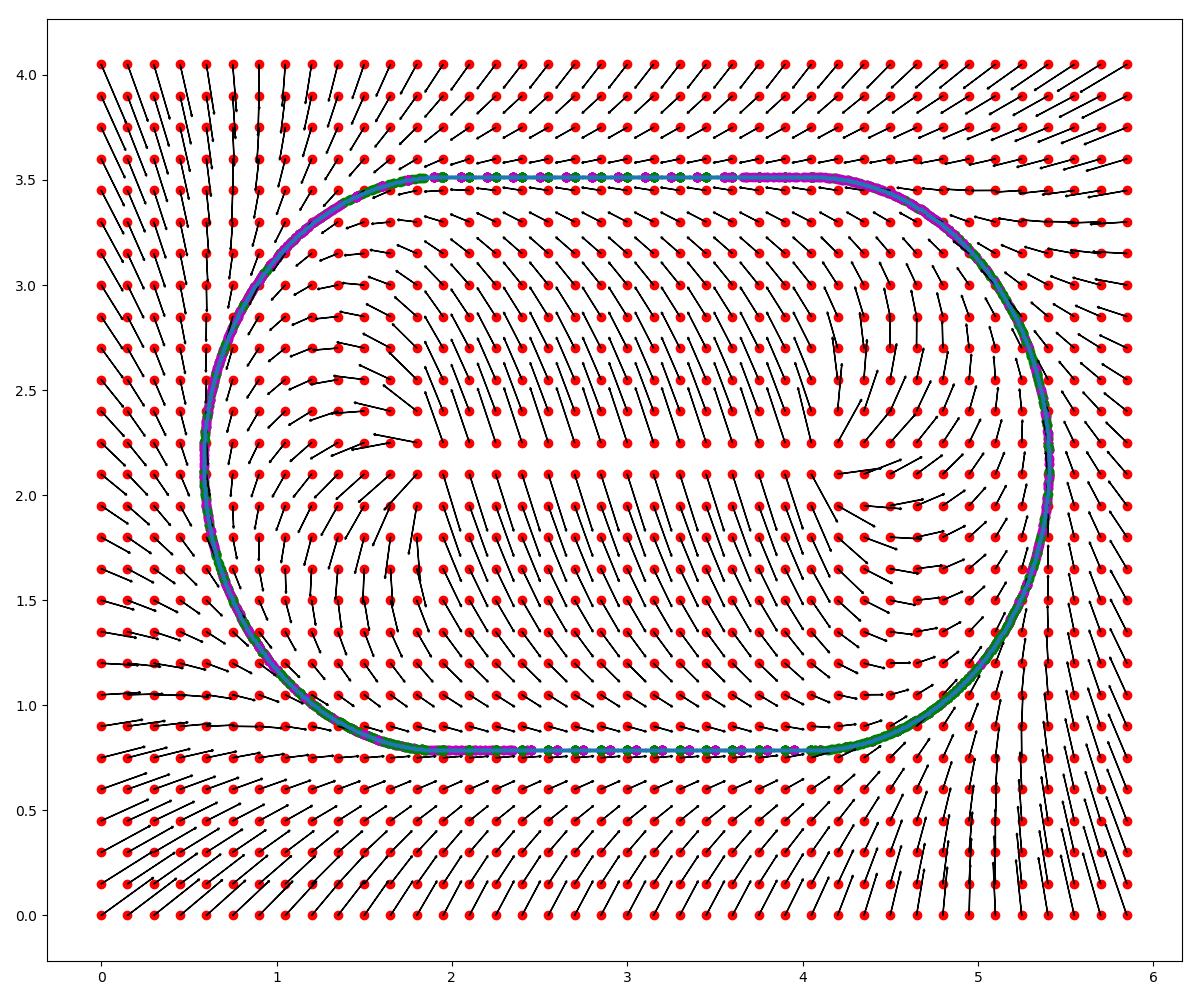
We include a vector field approach to navigate the car around the track. The vector field uses a force matrix with forces that pull the car towards the track. This matrix is precomputed and during navigation only a lookup in the force matrix is needed to find the force vector.
Making the force matrix
We create the force matrix using the provided make_force_matrixs.py file. It expects the path as a numpy array. The path is then inserted into a KD-Tree. For every point (discretized in a certain resolution) in the map we find the closest point on the path from the KD-Tree. The point we want to steer at however, is not the closest point but a point a little bit in front. This is called the lookahead point.
You can change the parameters in the make_force_matrixs.py file. The forces point towards a lookahead point with configurable distance. We create vector fields for two lanes.
Navigating with the force matrix
Once we have the force matrix we can use it to navigate the car. Using the car’s position we look up the appropriate force vector from the matrix. Using the car’s current orientation we apply a PID controller to make the car align with the force vector. Switching the lanes is as easy as switching the currently used vector field as the car will then be pulled into the new lane automatically.
Avoiding obstacles
Utilizing a vector with with zero lookahead offset we can check if there are obstacles on the path. This vector field has direction vectors to the closest point on the path. From the LiDAR data we check if there are any objects in near distance on our path and if so we switch lanes by setting the vector field to another lane.
Start the navigation
The navigation can be launched by
rosrun fub_navigation controller.py