Quick-Start Guide
Connect the battery
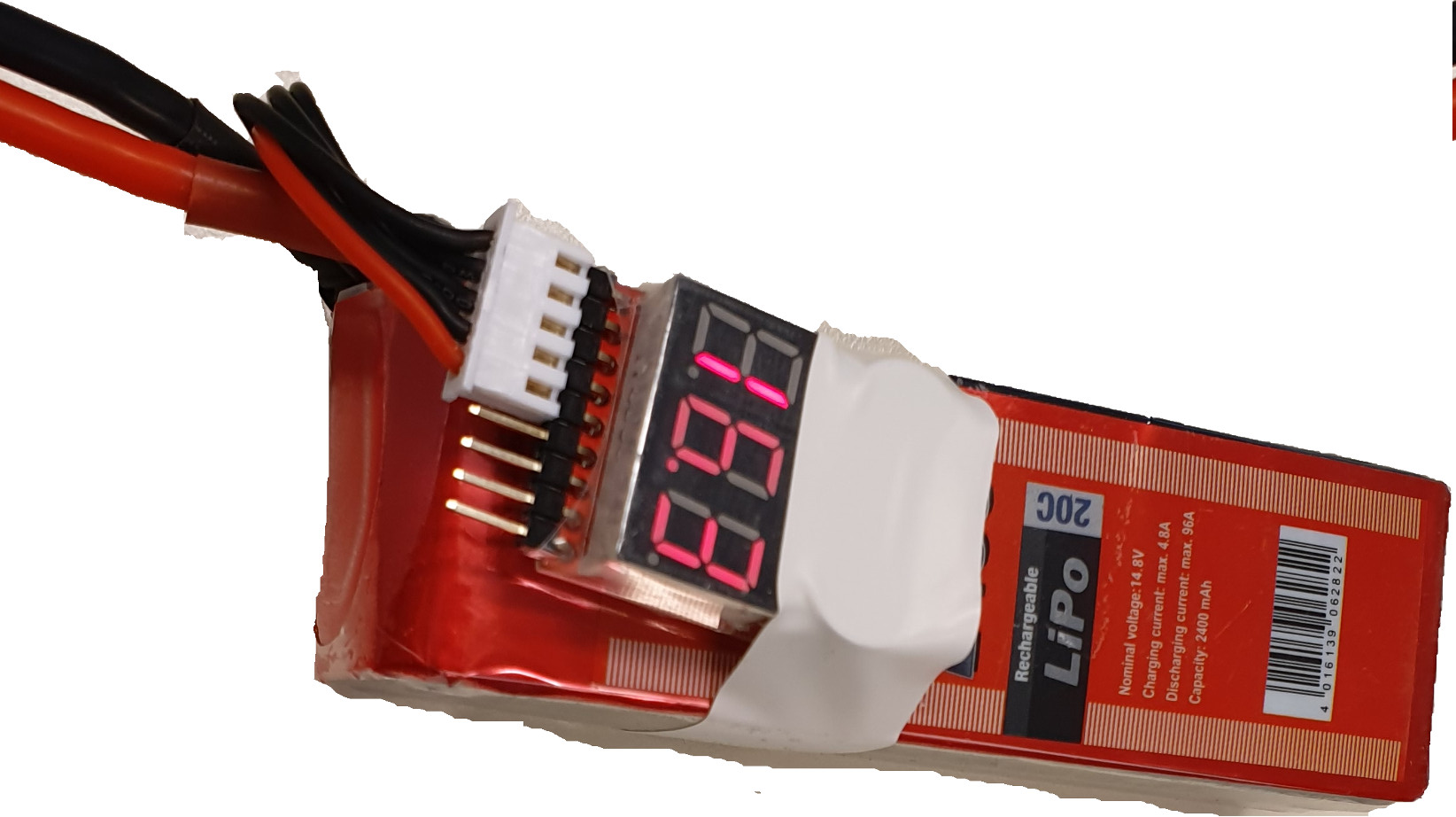
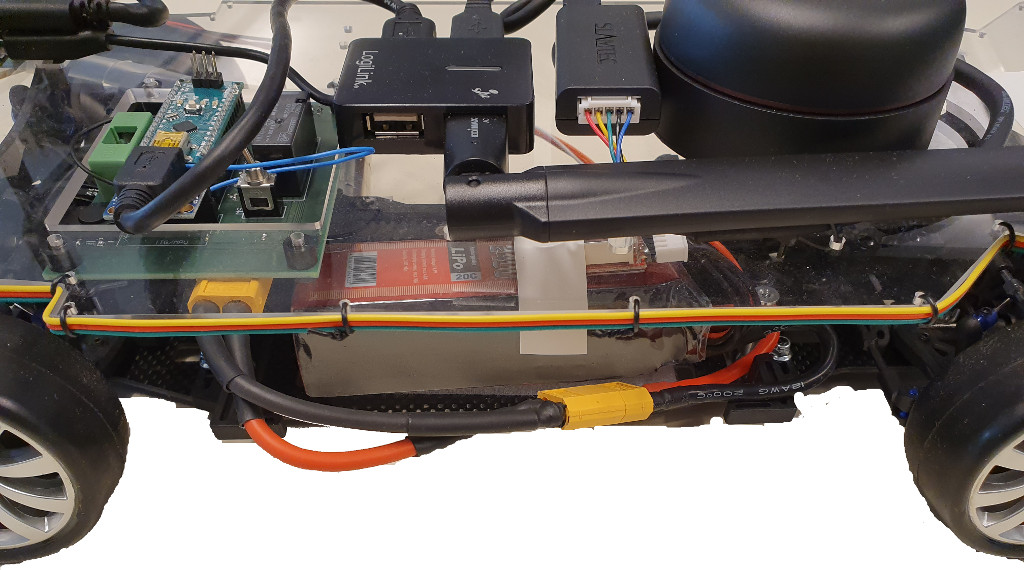
We use 14.8V (4 cells with 3.8V nominal voltage each) LiPo batteries to power the car. Plug the battery voltage tester to the battery and check that the voltage is above 14V. The LiPo battery’s voltage may never drop below 3.2V in any cell. The car will automatically shut down when the voltage of the battery drops below 12.8V but it is always better to have the battery voltage tester plugged in because it measures the voltage of each cell separately. Keep in mind that discharging a cell below 3.2V might destroy the battery and might explode when charging. Carefully connect a 14.4V rated LiPo battery to the battery cable and fixate the battery using the velcro stripe to the car.
Startup
Switch the lever pointing towards the back of the car and press the start button for at least 3 seconds. The car will now turn on and show the battery level using the LEDs on the rear and back of the car.
Voltage indicator
- Green: > 14.8V
- Yellow: > 13.0V and < 14.8V
- Red: < 13.0V
The car will turn itself off at 12.8V to prevent any permanent damage to the car but you should turn off the car immediately when the battery voltage tester begins buzzing.
It takes about 30s until the NUC has booted and the car’s software starts up. Once the car has booted the LiDAR will start spinning.
Connecting to the car
Each car is identified by it’s number which is printed on the acrylic
plate. This number is used to connect to the car over the WiFi network.
By default the car’s IP address is 192.168.43.[NUMBER]. To confirm the
car is running simply try connecting via ssh with user ros and the
password elfmeter:
ssh ros@192.168.43.[NUMBER]
Testing the actuators
Now you can try to steer and drive the car. Place the car on a box and run:
Setting the steering angle fifty percent to the left (ROS 2):
ros2 topic pub /actuators/steering_normalized autominy_msgs/NormalizedSteeringCommand "value: 0.5"
Driving the car at a speed level of 0.2 (ROS 2):
ros2 topic pub /actuators/speed_normalized autominy_msgs/NormalizedSpeedCommand "header: value: 0.2"
Create a workspace
The basic autominy packages are installed in /opt/autominy/catkin_ws. However, your packages should not be placed in that workspace. The autominy workspace might get updated and your work might get lost. Instead create your own workspace:
mkdir -p ~/[WORKSPACE_NAME]/src
cd cd ~/[WORKSPACE_NAME]/
catkin build
source devel/setup.zsh
Place your code and packages inside the src directory.