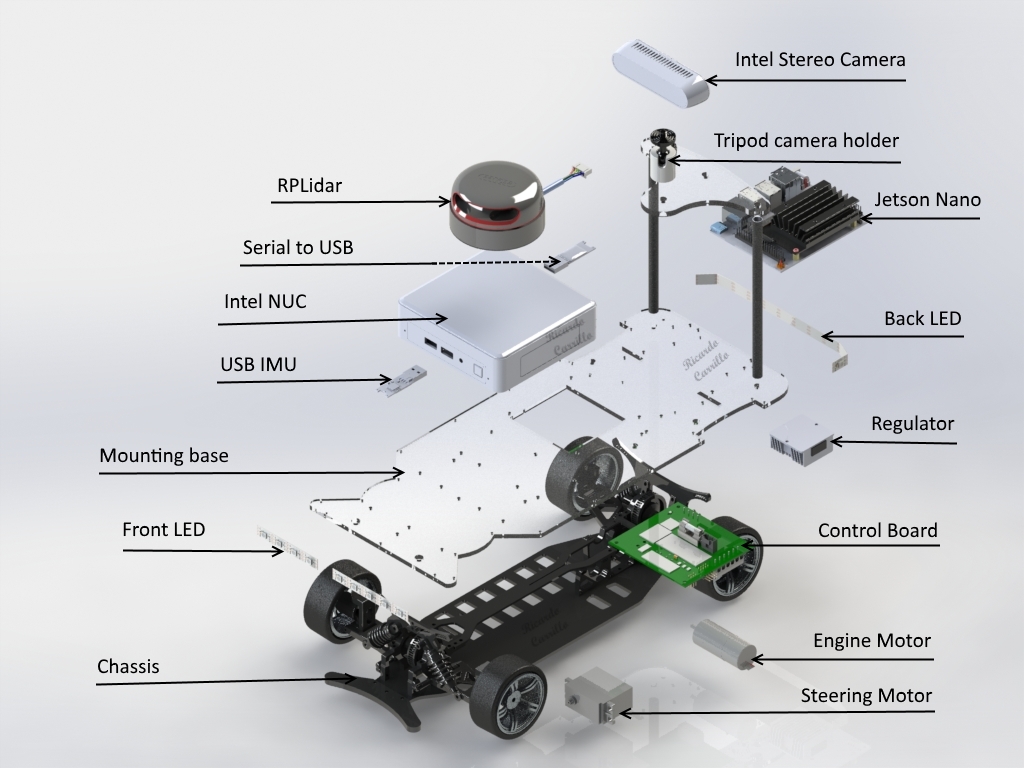
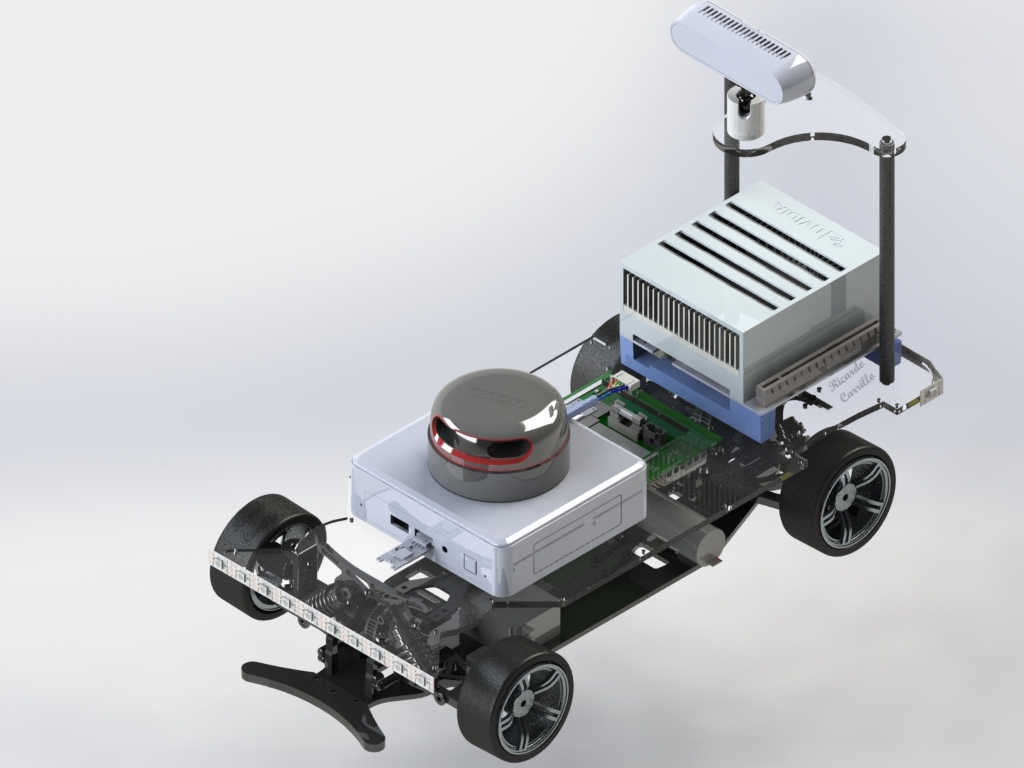
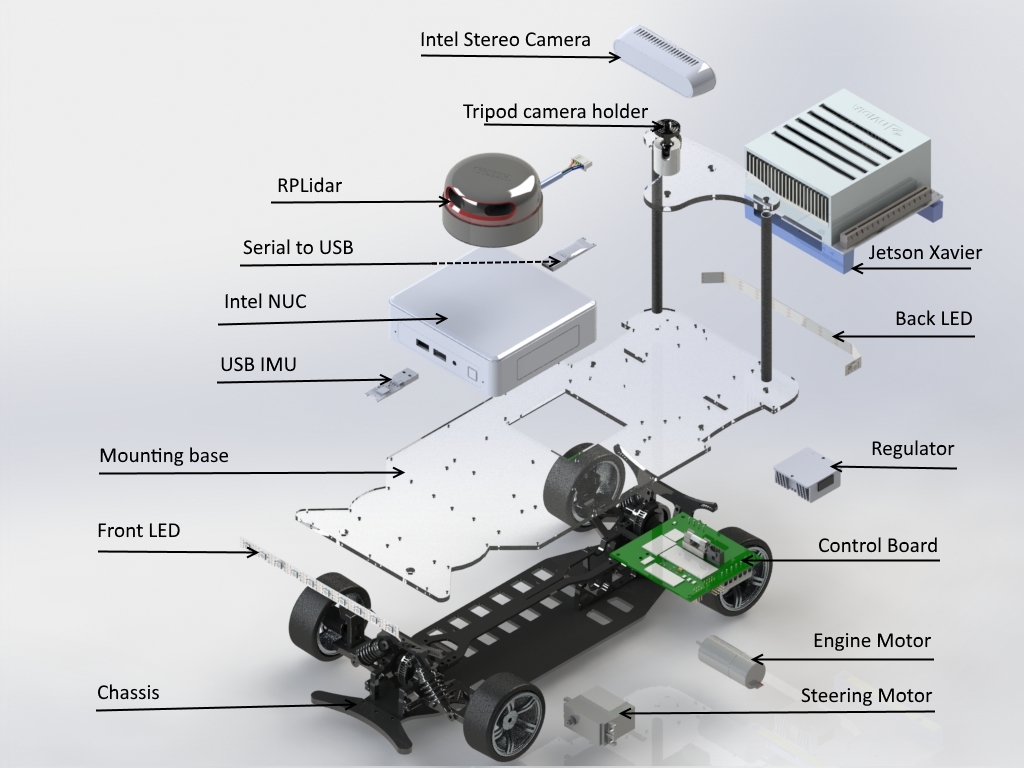
Autominy Nano and Xavier
Towards the technology being developed based on Artificial Neural Networks and Reinforcement Deep Learning and their advantages to process perception data mainly from cameras, Autominy can be upgraded to work with Jetson Nano and Jetson Xavier from NVIDIA. The Intel Stereo camera is plugged in directly into the Jetson to be processed by the inference which must be trained in an external GPU. Jetson ARM boards capabilities can be checked out here and here : The Nvidia boards results are sent to the NUC through Ethernet connection in order to control the car with the desired criteria. Additionally the camera holder has the option to install another Intel Camera, the idea behind this alternative is to provide the car, field of view also when is driving backwards. The components and the cars with the updated feature can be observed in the following galleries.